Forskningsprojekter
SAVA 2023-2026
Ny sensorteknologi bag fremtidens sikkerhedssystemer til autonome maskiner
Bag SAVA-projektet står et konsortium bestående af danske virksomheder og vidensinstitutioner, som sammen vil skabe fremtidens sikkerhedssystemer til autonome maskiner. Systemerne skal bygge på en kombination af de nyeste sensorteknologier og kunstig intelligens og derved kunne beskytte de mennesker, dyr og genstande, som befinder sig indenfor maskinernes rækkevidde. Ud over at højne sikkerheden er formålet også at reducere CO2-udledningen og øge biodiversiteten.

Baggrund
Autonomi er vejen frem, når det gælder om at reducere klimaaftrykket for maskiner i alle størrelser. Det skyldes blandet andet en optimal udnyttelse af kørselsmønstre og logistikplanlægning. Med autonomi følger dog behovet for sikkerhed. Det vil sige, at de autonome maskiner skal tage højde for uforudsete forhindringer såsom mennesker og dyr.
Områder med græs, træer og planter kan indeholde genstande, dyr og mennesker, som er svære at detektere. På den baggrund er det vigtigt at udvikle gedigne sikkerhedssystemer, som gør autonome maskiner i stand til at tage højde for både dynamiske og statiske forhindringer. Det vil sige, at maskinerne skal have evnen til at advare operatøren eller automatisk undgå forhindringerne. Opnås dette, sikres samtidig muligheden for at anvende optimerede kørselsmønstre for både automatiserede og assisterede maskiner.
Fokuseret udvikling af systemer til mange formål
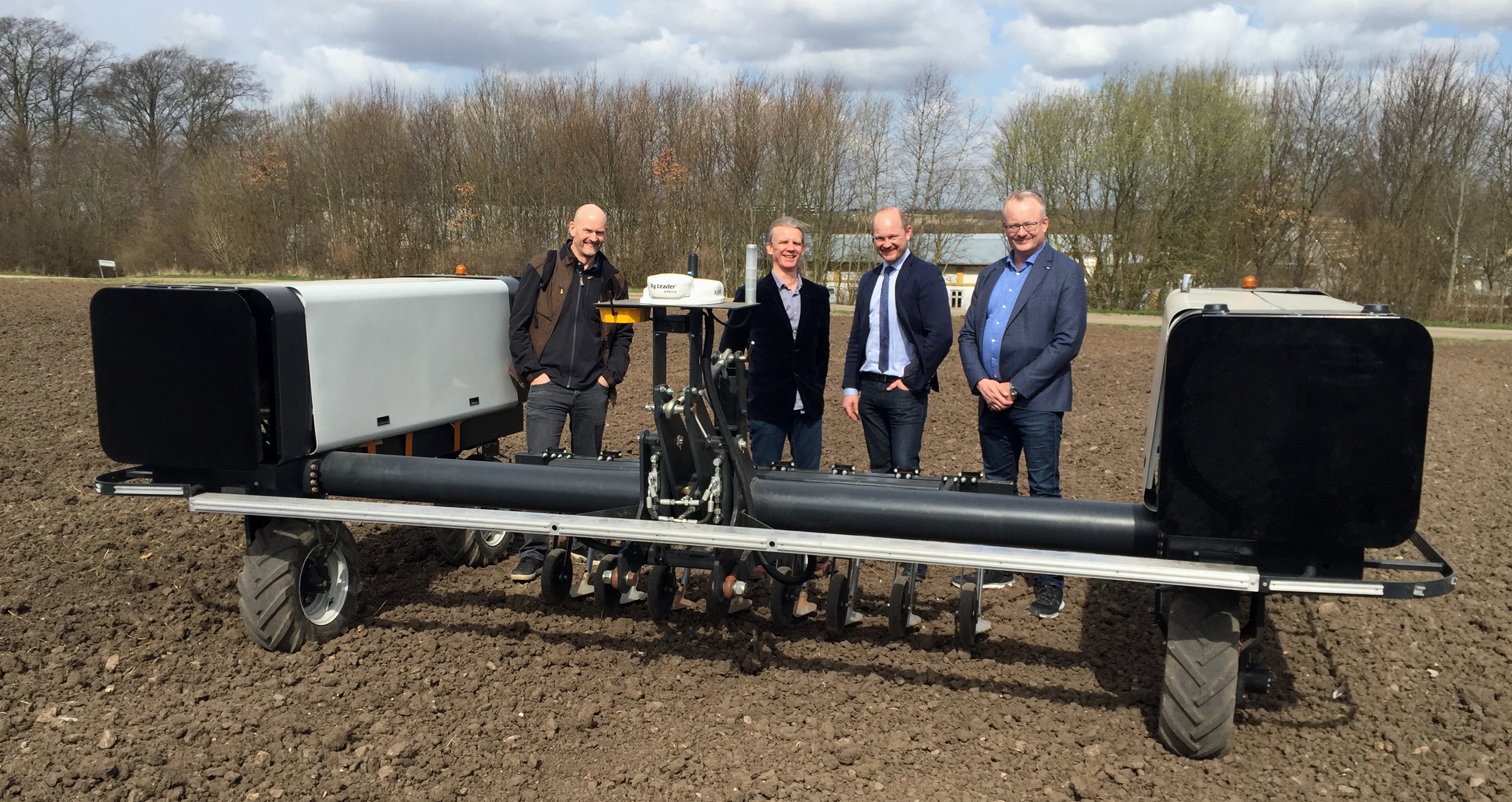
I løbet af en 3,5 års periode skal konsortiet teste og evaluere forskellige sensorteknologier og derved udvikle sikkerhedssystemer beregnet til alt fra mobile robotter til traktorer. Systemerne skal testes under forskellige forhold, og projektet inddrager derfor områder såsom græsmarker, parker, frugtplantager og vinmarker.
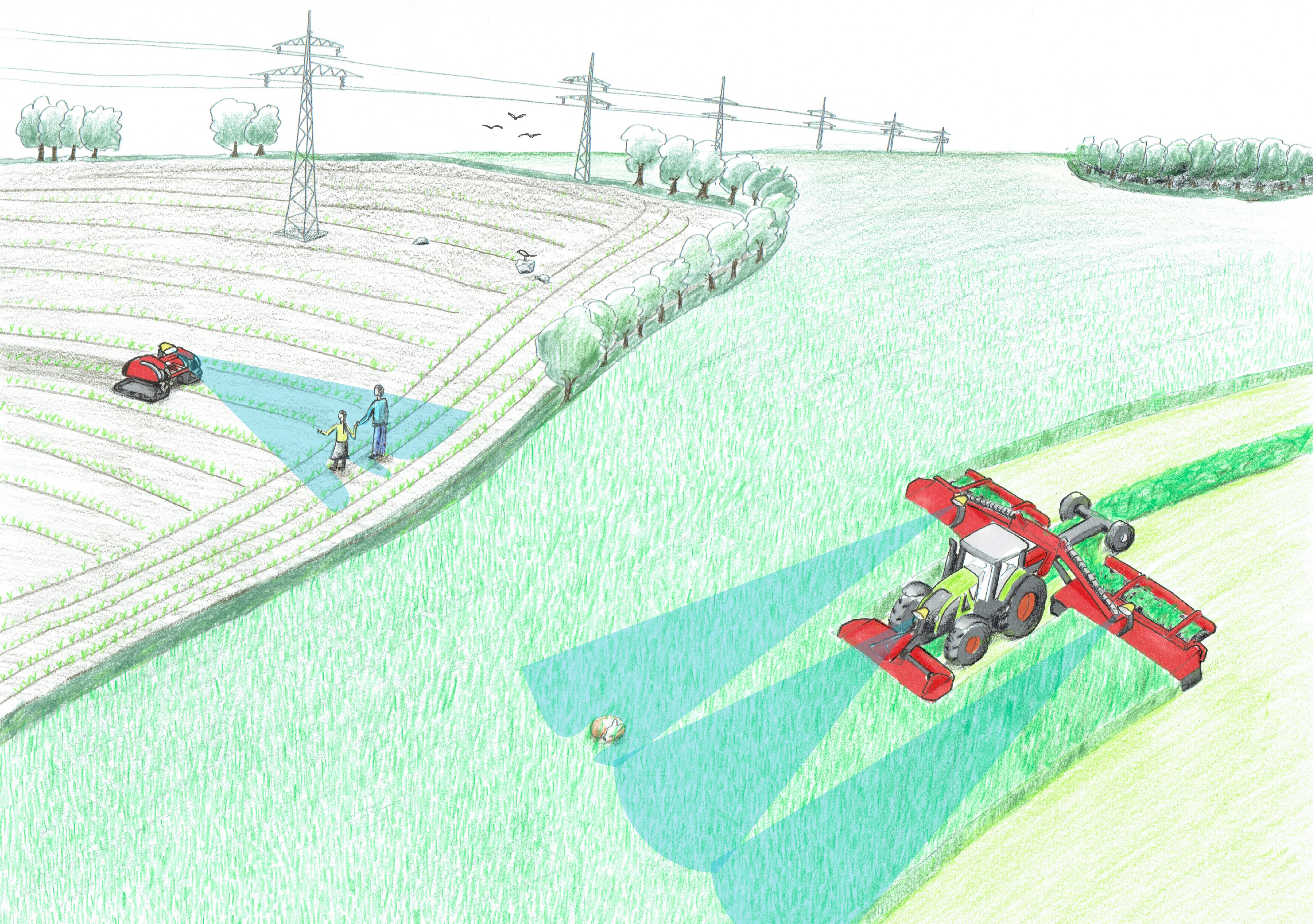
Påkørsler af dyreunger, som gemmer sig i afgrøderne, er et eksempel på, hvorfor det er så vigtigt at udvikle disse sikkerhedssystemer. Ifølge Dansk Jægerforbund er dette et stort problem, idet en undersøgelse fra 2017 vurderer, at op til 20.000 rådyrlam påkøres hvert år i de danske marker.
Perspektiverne er derfor store både i forhold til at højne den generelle sikkerhed og til at optimere operatørens arbejde. For det første kan de nye sikkerhedssystemer forhindre meningsløse og fatale skader på dyr, mennesker og genstande. Dernæst kan løsningerne også spare maskinejeren for tid og penge, idet beskadigelser på såvel maskineri som afgrøder undgås. Sidst men ikke mindst vil det skåne den enkelte operatør for ubehagelige oplevelser, herunder at påkøre et sagesløst dyr.
Bevilling
Projektet med den officielle titel SAVA – Safety in autonomous Vehicles in Agriculture er skudt i gang 01. april 2023 og løber frem til 30. september 2026. Innovationsfonden har bevilget 15,9 millioner kroner til projektet, som har et samlet budget på 23,8 millioner kroner.
Partnere
Danmarks Tekniske Universitet, Teknologisk Institut, AGCO, Agrirobot, Conpleks Innovation og Maybe Robotics, hvor sidstnævnte er tovholder på projektet.
SqM-Farm 2018-2022
Præcisionslandbrug til gavn for landmanden, afgrødernes vækst og miljøet
Projektet anvender kunstig intelligens, satellitter, sensorer, robotter og droner til at udvikle en række beslutningsstøttende produkter, der angiver markens stedspecifikke sundhedsstatus gennem en lang række observationer. På den måde får landmanden et større overblik og kontrol over afgrødernes sundhed gennem et dagligt dataflow, hvilket skal resultere i, at udbyttet kan øges, mens brugen af pesticider og næringsstoffer kan reduceres.

Baggrund
Formålet med projektet er gennem daglig overvågning at skabe et næsten kvadratmeterspecifikt sundhedsbarometer for den enkelte mark, som dermed bliver et beslutningsstøttende produkt til landmanden. I forlængelse heraf er målet at forene brugen af en række forskellige teknologier og værktøjer, således de i højere grad bliver anvendelige og dermed en naturlig del af landbruget.
Med projektet bliver det muligt at forene de forskellige teknologier og dermed skabe løsninger, der kan vurdere afgrødernes stedsspecifikke sundhed. Nærmere bestemt om afgrøderne har det godt, eller om der er noget, landmanden skal reagere på forskellige steder i marken, herunder mangel på vand, kalium eller kvælstof. Derudover skal løsningerne kunne være med til at bestemme de mest optimale høsttidspunkter ligeledes på parcelniveau.
Kompleks teknologi bag de beslutningsstøttende produkter
For at sikre de korrekte og fyldestgørende observationer, som de beslutningsstøttende produkter skal bygge på, skal projektet udvikle flere forskellige teknologier. I praksis betyder det blandt andet kameraer til forskellige typer afgrøder, adskillige softwareprodukter med kunstig intelligens samt observationsrobotter og -droner.
Conpleks udvikler selvkørende robotter og en cloudløsning til SqM-Farm-projektet. Robotterne fungerer som observationsplatforme, der monteret med kameraer indsamler stedsspecifikke data om markens tilstand. Dataene sendes til clouden, hvor de samkøres med dronernes observationer og gemmes.
Samlet set kan de beslutningsstøttende produkter få stor betydning for mange landmænd, idet de fremover kan tilpasse tildelingen af vand, næringsstoffer, bekæmpelsesmidler med mere til specifikke dele af marken til gavn for miljøet, afgrødernes vækst og produktionsøkonomien.
Bevilling
Projektet Kunstig intelligent automatiseret big data stedspecifik beslutningsstøtte til landbrug også kaldet SqM-Farm begynder 1. januar 2018 og løber til 31. december 2022. GUDP under Miljø- og Fødevareministeriet har bevilget 14.796.460 kr. til projektet.
Partnere
Agro Intelligence, Aarhus Universitet, Gyldensteen Gods, Syddansk Universitet, Ceptu, IBM og Conpleks Innovation.
Inde-ude-inde 2019
Sensor- og styringsteknologi til autonome robotter, der kører mellem indendørs og udendørs områder
Tendensen indenfor robotudvikling i dag er, at der skelnes mellem robotter til indendørs og udendørs brug. Dette skyldes for eksempel, at hver robottype kræver forskellige mekaniske konstruktioner, fysiske egenskaber og teknologiske løsninger. I modsætning til en indendørs robot skal en udendørs robot blandt andet kunne klare vind og vejr, være robust og kunne køre i kuperet og stejlt terræn.
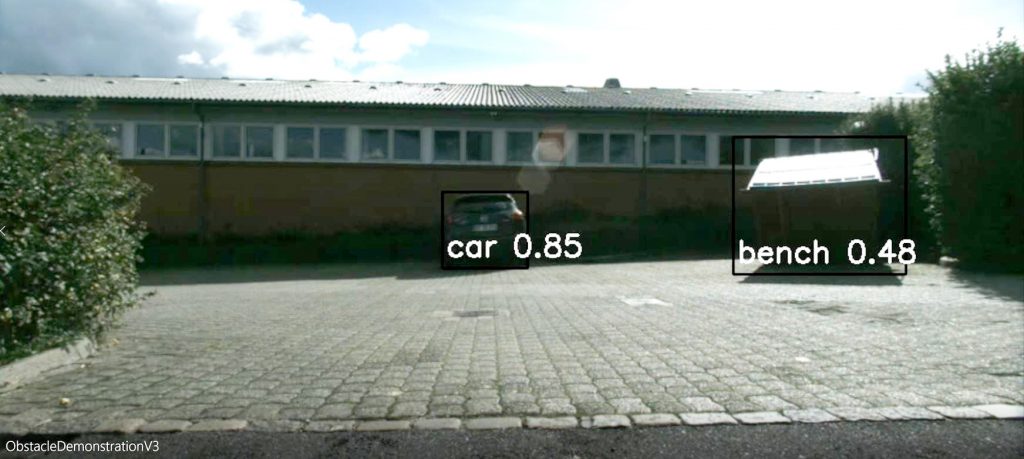
Udendørs detektering og kategorisering af forhindringer ved hjælp af kunstig intelligens
Baggrund
I løbet af få år er antallet af indendørs, mobile logistikrobotter i både service- og sundhedssektoren samt industrien steget markant. I takt med at flere og flere robotter installeres rundt omkring i virksomhederne og på sygehusene, øges bevidstheden hos brugerne og de mennesker, der kommer i kontakt med robotterne. Det drejer sig blandt andet om, hvordan robotterne kan anvendes, ligesom der opstår ønsker og krav til nye funktioner.
Formålet med projektet er at adressere problemstillingen omkring det stigende ønske om robotter, der både kan navigere indendørs og udendørs, og samtidig fremme udviklingen af den nødvendige sensor- og styringsteknologi, hvormed inde-ude-inde-kørsler muliggøres.
Sensorteknologi skal koble inde med ude og inde
I forbindelse med de teknologiske løsninger til lokalisering og navigation benytter indendørs og udendørs mobile robotter traditionelt set forskellige metoder og teknologier. På den baggrund er det sjældent, at allerede eksisterende robotter kan bevæge sig rundt både indenfor og udenfor, såsom at krydse et udendørs areal for at komme fra en bygning til en anden. En måde at realisere inde-ude-inde-kørsel på er ved at anvende de kendte metoder, som virker indenfor hvert deres område. For en kombination af de forskellige typer sensorer vil kunne kompensere for de enkelte sensorers begrænsninger.
Samspillet mellem de forskellige sensorer i overgangen mellem de indendørs og udendørs områder er et af de aspekter, der har været fokus på i projektet. Herunder hvordan robotten kan detektere, hvornår den krydser grænsen mellem områderne. På den baggrund er der lavet en solid detektering af, hvornår robotten krydser fra det ene område til det andet, sammen med en evaluering af kvaliteten af data fra robottens sensorer, herunder GPS, LIDAR og kamera, for hvert område. Sidstnævnte er især vigtigt, da der kan være stor forskel på, hvordan et kamera reagerer i indendørsbelysning og udenfor i direkte sollys.
Projektet
Udviklingsprojektet er støttet af Styrelsen for Institutioner og Uddannelsesstøtte under Uddannelses- og Forskningsministeriet.
Partnere
Teknologisk Institut, SDU – Mærsk McKinney Møller Instituttet, Capra Robotics ApS, CesTek Automation, Maskinsikkerhed ApS, Robotize ApS, Center for Ejendomme Region Hovedstaden og Conpleks Robotech.
FODS-projekt til test af TAPAS-netværk 2018
Ny testplatform i Aarhus til præcis positionering
Den nye testplatform, TAPAS, åbner op for uanede muligheder for arbejdet med præcis positionering og kan dermed bidrage til, at Danmark er med helt i front omkring teknologisk udvikling indenfor droner, selvkørende biler og robotter. Det er Styrelsen for Dataforsyning og Effektivisering (SDFE), der står bag TAPAS-netværket, som kombinerer satellitdata fra forskellige satellitsystemer. Netværket er tilgængeligt for både virksomheder og offentlige institutioner til test af meget nøjagtig positionering.

Foto: SDFE
Baggrund
TAPAS-netværket består af elleve referencestationer, der er placeret med maksimalt syv kilometers afstand, og som udsender signaler, de førerløse køretøjer kan navigere efter. En række forskere vil ligeledes bruge de elleve referencestationer til at udvikle en meget høj datakvalitet af signaler fra navigationssatellitter, herunder GPS, Glonass og Galileo. Så høj en kvalitet, at der kan tages højde for byrum samt forstyrrelser i atmosfæren, troposfæren og ionosfæren, herunder for regnvejr, der kan påvirke signalers nøjagtighed med flere centimeter.
For at teste TAPAS-netværket har SDFE oprettet et projekt, FODS, og allieret sig med Conpleks, der deltager i projektet med en semiautonom græsklipperrobot.
Conpleks leverer centimeterpræcise testresultater
Conpleks har tilkoblet den første robot til TAPAS-netværket bestående af en semiautonom græsklipperrobot, der skal lave en række tests, hvormed SDFE og de andre projektpartnere kan afklare de formål, FODS-projektet har opstillet. Ved hjælp af netværket kan Conpleks positionere robotten meget præcist, idet forskellige tests har vist en nøjagtighed på 1 cm og derunder. Dette er vigtigt, idet præcision er en af de vigtigste parametre for at løse opgaver med udendørs, mobile robotter.
Hovedformålet med testene er at lave en undersøgelse af i hvilken grad, den opnåede realtidspositionering i skyen af et semiautonomt, GNSS-baseret køretøj er reelt brugbar i forhold til den præcision, en kommune har brug for ved en øget automatisering af drift og vedligehold af byarealer. I forlængelse heraf skal de tekniske muligheder for at integrere positioneringsdata fra Conpleks Clara Cloud i en kommunes driftssoftware afdækkes, ligesom der skal laves en vurdering af i hvilken grad, løsningerne kan være med til at bane vejen for lignende initiativer hos andre kommuner og myndigheder.
Det vil sige, projektet skal sikre en mere effektiv og hurtigere adgang til realtidsdata for autonome køretøjer for kommunens medarbejdere i forbindelse med udførelsen og planlægningen af vedligeholdelsesopgaver. Samtidig skal projektet give en øget indsigt i mulige tekniske barrierer for etablering af en fælles kommunal datainfrastruktur for brug af positionerings- og navigationsdata for vedligehold af offentlige byarealer. Sidst men ikke mindst skal der udarbejdes en cost-benefit-analyse baseret på projektets omkostninger sammenholdt med de observerede besparelser.
Projektet
Styrelsen for Dataforsyning og Digitalisering er initiativtageren bag FODS-projektet, som begynder i august 2018 og løber til udgangen af december 2018.
Partnere
Styrelsen for Dataforsyning og Digitalisering, Aarhus Kommune, Sweco, DTU Space og Conpleks Innovation.
GrassBot2 2018-2020
Autonom letvægtsmarkrobot med innovativt sikkerhedssystem til høst af lavbundsarealer
GrassBot2 bygger videre på det tidligere GrassBot-projekt, som udviklede en letvægtsmarkrobot, der var i stand til at høste biomasse på lavtliggende områder. Det videre forløb for GrassBot2 bliver derfor at udvikle markrobotten til ligeledes at kunne indsamle biomassen. På sigt skal den indsamlede biomasse anvendes til fremstilling af grønt protein til fodring af grise og høns, mens restproduktet blandt andet skal anvendes til biogas.
Baggrund
Formålet med projektet er at designe og udvikle et automatiseret letvægtshøstesystem konstrueret til høst og transport af græs på lavbundsarealer med et integreret sikkerhedssystem, der kan håndtere den overordnede styring og kontrol af markrobotten, og som kan detektere og undgå forhindringer i marken, herunder dyr, hydranter og andre maskiner.
Conpleks bidrager til projektet med det innovative sikkerhedssystem, hvor obstacle avoidance-adfærden håndteres af en applikationscontroller, og personsikkerheden håndteres af en safetycontroller. Controllerne skal henholdsvis kobles med sensorer samt kameraer og softwarealgoritmer i samarbejde med projektets andre partnere. Foruden udviklingen af controllerne skal Conpleks sikre dataindsamling igennem udviklingen af en cloudløsning.
Optimal udnyttelse af biomasse på lavtliggende arealer
De traditionelle maskiner, som er tunge og dermed kan ødelægge græstørvens bæreevne, kan kun høste de lavtliggende områder indenfor et kort tidsrum. Med GrassBot2-projektets letvægtsløsning kan lavbundsarealerne høstes over en længere periode og dermed flere gange på en sæson, hvormed udbyttet og kvaliteten af biomassen øges.
GrassBot2-projektet skal endvidere arbejde på at optimere produktionen, høsten og transporten af grøn biomasse, herunder at maksimere udbyttet og kvaliteten af grønt protein udvundet fra fugtighedstolerante græssorter dyrket på lavtliggende områder. Det indbefatter blandt andet videnskabelige eksperimenter, hvor græssorterne skal dyrkes ved forskellige gødningsniveauer og høsttidspunkter, hvorefter proteinindholdet og ekstraherbarheden analyseres.
Bevilling
GrassBot2-projektet begynder 1. maj 2018 og løber til 31. juli 2020. EU’s Europæiske Fond for Regionaludvikling og ERST/Region Midtjylland har bevilget 1.999.982 kr. som medfinansiering til projektet.
Partnere
Agro Business Park, AgroIntelli, Lykketronic, Aarhus Universitet – Agro, Aarhus Universitet – Eng og Conpleks Innovation.


AutoTurf – Energieffektiv autonom robot til græspleje på golfbaner 2016-2017
Formålet med AutoTurf-projektet er at udvikle, afprøve og dokumentere en løsning til energieffektiv og automatiseret græspleje på golfbaner.
Baggrund
Baseret på en innovativ prototype af en autonom robot, som kan monteres med forskellige værktøjer til græspleje, herunder klipning, slåning og vertikalskæring, bliver der gennem en omfattende innovationsindsats skabt grundlag for et færdigt koncept til en fuldt funktionsdygtig autonom robot til græspleje. Derved etableres der mulighed for at markedsintroducere et nyt produkt til automatiseret og multifunktionel græspleje på større sammenhængende arealer. Hér findes der ikke for øjeblikket godkendte, autonome robotter, som dækker kravene til professionelle high-end maskiner.
Projektet hviler på Region Syddanmarks viden og kompetencer inden for energieffektivisering, mekatroniske systemer og autonom robotteknologi.
Fuldautomatisering af rutinepræget græspleje
Det innovative AutoTurf-koncept med en energieffektiv autonom robot til græspleje på større sammenhængende græsarealer er især nyskabende ved, at der skabes mulighed for fuld automatisering af en omfangsrig og stærkt rutinepræget græsplejeopgave. Derved bliver klassiske automatiseringsfordele introduceret, hvilket reducerer driftsomkostninger til personale, brændstof og maskinafskrivninger. Samtidigt mindskes forbruget af pesticider og gødning som følge af den optimerede græspleje. Den autonome robotløsning lægger sig ind under megatrenden for udvikling af selvkørende køretøjer. AutoTurf forventes at opleve stor efterspørgsel i markedet for professionel græspleje. Værdiskabelsen vil være lokaliseret i et af Region Syddanmarks yderområder.
Bevilling
Conpleks er partner i AutoTurf-projektet og varetager forskning og udvikling relateret til de nødvendige Cloud-løsninger. Projektet er støttet af EU og Region Syd og kører frem til 2019.
Partnere
Sidis Engineering ApS, Syddansk Universitet, CLEAN, Banke ApS og Conpleks Innovation.
SAFE – Safer Autonomous Farming Equipment 2014-2017
Udvikling af ufarlige, selvkørende landbrugsmaskiner
Automatiseringen af landbrugssektoren er for alvor sat på dagsordenen både i form af EU’s nye rammeprogram, Horizon2020, og det globale behov for en bedre udnyttelse af vores fødevareressourcer. Her har robotteknologi vist sig at være effektiv i flere henseender, blandt andet i forhold til de øgede krav til sikkerhed, der er i en landbrugssektor, der i stigende grad bliver automatiseret. Projektet SAFE sætter fokus på problemstillingen omkring sikkerhed.
Baggrund
Målet med SAFE-projektet er at udvikle selvkørende landbrugsmaskiner, der kan slå græs, luge roer og høste hvede, uden at dyr og mennesker udsættes for risiko. I dag er selvkørende landbrugsmaskiner allerede på arbejde ude i markerne dog med den ulempe, at de skal overvåges konstant for at beskytte mennesker og dyr.
I SAFE samler man derfor de store maskinproducenter til landbruget og universiteterne for at udvikle sensorer og en mere avanceret analyse af data, der kan forfine de selvkørende maskiner, så de bedre kan registrere, når mennesker og dyr befinder sig i nærheden af maskinerne. Det kan forhindre ulykker og vil i langt højere grad end i dag forebygge skader på dyr, herunder rådyr, fugle med videre, der gemmer sig på marken.
Kombinationen af virksomhedernes ekspertise inden for landbrugsmaskiner og forskernes kompetencer inden for sensorteknologi skal sikre den optimale kombination af sensorer for hver enkelt type landbrugsmaskine. Sensorerne er maskinernes øjne og ører, og placeringen af dem på maskinerne skal optimeres til de enkelte maskintyper. En mejetærsker skal fx holde øje med andre ting end en radrenser.
Stort potentiale for kommercialisering
En øget grad af automatisering og sikkerhed vil være nødvendig for at understøtte fremtidens landmand, hvor bevarelse af jordens dyrkningspotentiale og det gode landmandsskab er essentielt, og samarbejdet i projektet vil få en betydelig indflydelse på udviklingen af området.
Den største showstopper for at slippe robotterne fri i marken har været sikkerheden, og det er projektpartnernes håb, at deres viden og forskningskompetencer resulterer i kommercielle produkter, som kan skabe grundlaget for endelig at slippe robotterne løs hos landmanden, eller i det mindste at gøre det mere sikkert for ham at køre i marken med sine store og ofte meget brede maskiner.
Bevilling
Projektet startede den 1. marts 2014 og slutter den 31. august 2017. Innovationsfonden bevilger 15 millioner kroner, og projektets samlede budget er på 29 mio. kr.
Partnere
AgroIntelli, Aarhus Universitet, KeyResearch, CLAAS Agrosystems, Syddansk Universitet, Innovationsnetværket RoboCluster og Conpleks Robotech.
GrassBots forskningsprojekt 2012-2014
Små robotter kan blive et vigtigt værktøj i bestræbelserne for øget produktivitet og bæredygtighed i landbruget
Teknik er overalt i landbruget, og den bliver mere og mere intelligent. Intelligente fugleskræmsler og droner, der kan spotte fugle, ukrudt og råvildt på markerne, er for alvor på spring ind i landbruget, og et af de nyeste tiltag er anvendelse af små robotter på markerne.

Forbedrer natur og miljø og bidrager med råvarer til biobaseret produktion
Erhvervsudviklingsprojektet GrassBots 2012-2014, der blandt andet involverede forskere fra Aarhus Universitet og Syddansk Universitet og en række kommercielle partnere, udviklede en platform, der via en lille og let landbrugsmaskine var i stand til at høste på lavbundsarealer eksempelvis ådale, hvor de traditionelle landbrugsmaskiner må give fortabt. Biomassen herfra kan få en betydelig rolle i fremtidens biobaserede samfund. I ådalene eller anden svær tilgængelig jord kan høst af flerårige afgrøder forbedre natur og miljø samtidig med, at der kommer råvarer til biobaseret produktion.
Flere maskiner, én operatør
Ud over den lave vægt muliggør avanceret navigationssoftware, ruteplanlægnings- og positioneringssystem, at maskinen kan køre autonomt, hvilket betyder, at landmanden på sigt kan gå fra at være operatør til observatør på op mod en håndfuld maskiner med forskellige funktioner. Dette vil højne produktiviteten på enkelte opgaver og reducere jordpakning og brændstofforbruget.
GrassBots prototypen bestod af kendte redskaber, blandt andet en Lynex redskabsbærer, en Kongskilde græsklipper samt en ny Conpleks Robotech Controller.
Partnere
Grassbots-projektet havde ud over Aarhus Universitet også Kongskilde Industries, Lynex, Conpleks Innovation, Syddansk Universitet, Bertelsen Design og Agro Business Park som partnere, samt universiteter i Finland og England i kraft af finansiering fra EU/ICT-Agri. Ud over projektdeltagernes egen finansiering støttede Region Midtjylland projektet via erhvervsudviklingsprogrammet Biomasse til Energi.
CLARA SmartAgriFoodII Projektet 2014-2015
Conpleks fik tildelt støtte til udviklingen af den såkaldte Clara App softwareplatform fra EU’s SmartAgriFoodII-program. Clara-projektet kørte i perioden 2014-2015 og havde til formål at udvikle en softwareplatform til smarte Apps til styring af blandt andet landbrugsrobotter.

Conpleks udviklede i denne sammenhæng selve App’en, den underliggende softwarearkitektur samt softwaren til integration på de robotter og avancerede landbrugsredskaber, der skal kunne styres ved hjælp af App’en. Conpleks anvendte i denne sammenhæng nogle helt nye softwareværktøjer udviklet som et led i FIWARE-udviklingsprogrammet.
SmartAgriFood Accelerator-programmet støtter SMV’er, som udvikler smarte tjenester og apps, der skal anvendes til landbrug og fødevarer. Efter en ansøgningsproces med mere end 150 ansøgere, udvalgte SmartAgriFood Accelerator-programmet de 50 mest lovende virksomheder og projekter, som fik støtte, heriblandt Conpleks med Clara App’en.