Research projects
SAVA 2023-2026
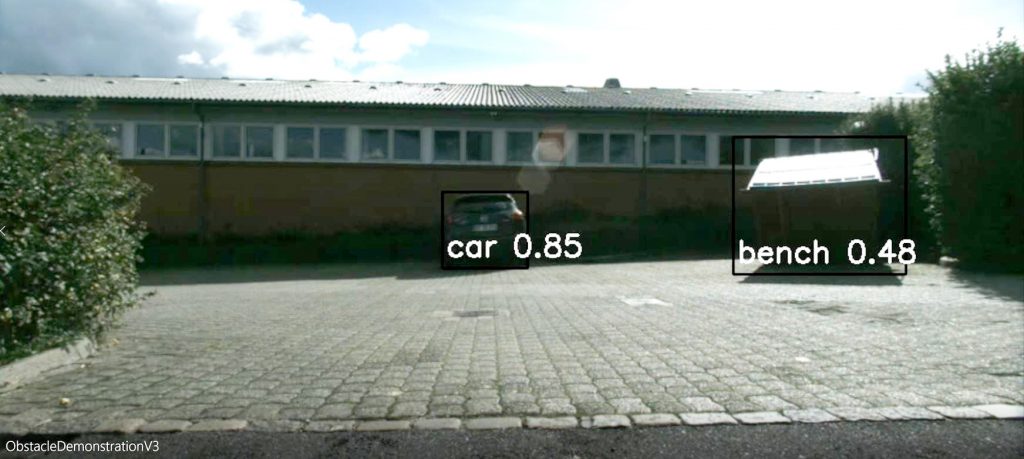
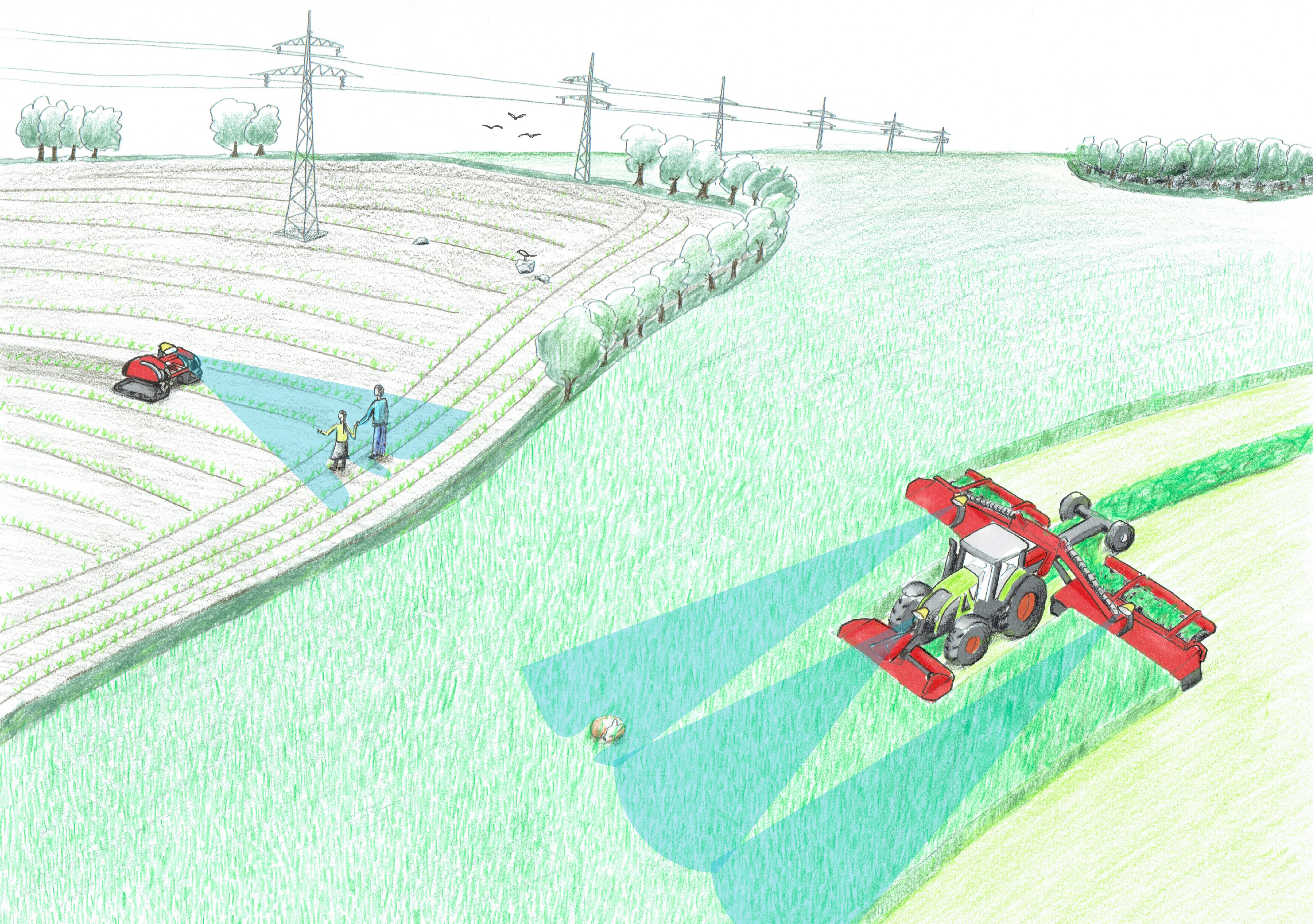
New sensor technology behind future safety systems for autonomous machinery
A number of Danish companies and education insitutions have joint forces in a consortium to develop future safety systems for autonomous machinery. The systems will build on a combination of the newest sensor technologies and AI in order to protect humans, animals and objetcs located within the reach of the machinery. Besides securing better safety, the goal is to reduce CO2 emissions and increase biodiversity.

Background
Autonomi is the way to go, when it comes to reducing the climate footprint of machinery of all sizes. This is among other things due to an ideal utilization of driving patterns and logistic planning. However, with autonomy comes the need for safety. This means that the autonomous machinery must take unforeseen obstacles such as people and animals into account.
Areas with grass, trees and plants can hold obstacles, animals and humans, who are difficult to detect. Therefore, it is important to develop solid safety systems that enable autonomous machinery to distinguish both dynamic and static obstacles. This means that the machinery must either have the ability to warn the operator or to automatically avoid the obstacles. If this is achieved, the possibility of using optimized driving patterns for both automated and assisted machinery is also ensured.
Focussed development of systems for many purposes
Over a period of 3.5 years, the consortium will be testing and evaluating different sensor technologies and thereby develop safety systems designed for everything from mobile robots to tractors. The systems must be tested under different curcomstances and therefore, the project involves areas such as grass fields, parks, orchards and vineyards.
Collisions with fawns that hide in the crop, is an example of why it is so important to develop these safety systems. According to the Danish Hunters’ Association, this is a major problem, as a study from 2017 estimates that up to 20,000 fawns are run over each year in the Danish fields.
The prospects are therefore great both in terms of increasing general safety and optimizing the operator’s work. Firstly, the new safety systems can prevent meaningless and fatal damage to animals, people and objects. Secondly, while avoiding damage to both machinery and crops. the solutions can also save the machine owner time and money. Last but not least, it will spare the operator from unpleasant experiences, including hitting an oblivious animal.
Financing
SAVA, with the official name Safety in autonomous Vehicles in Agriculture, starts 01.04.2023 and ends 30.09.2026. Innivation Fund Denmark has allocated DKK 15.9 million for the project, which has a total budget of DKK 23.8 million.
Partners
Technical Univeristy of Denmark, Danish Technologaical Institue, AGCO, Agrirobot, Conpleks Innovation and Maybe Robotics. The latter works as project manager.
SqM-Farm 2018-2022
Precision farming for the benefit of the farmer, crop growth and the environment
The project uses artificial intelligence, satellites, sensors, robots and drones to develop a number of decision supporting products, which indicates the field’s specific health status through a wide range of observations. This daily dataflow gives the farmer a wider overview and control of the crop health, which should result in increased yield while reducing the use of pesticides and nutrients.

Background
The purpose of the SqM-Farm project is to create an almost square meter specific health barometer for each field and therefore a decision-supporting product for the farmer. Additionally, the goal is to combine a variety of technologies and tools, making them more usable and thus a natural part of everyday farming.
The project makes it possible to combine different technologies and create solutions that can assess the site-specific crop health. Specifically, whether the crops are thriving or whether there are certain circumstances, the farmer should respond to at different sites in the field, including lack of water, potassium or nitrogen. Furthermore the solutions should help determine the most optimal time for harvesting, also down to a site-specific level.
Complex technology behind the decision-supporting products
To secure the most correct and adequate observations for the decision-supporting products to rely on, the project will develop several different technologies. In reality it means cameras for different types of crops, several software products with artificial intelligence and observation robots and drones.
Conpleks contributes to the SqM-Farm project by developing mobile robots and a cloud solution. The robots act as observation platforms that mounted with cameras collect site-specific data about the crop health status. The data is sent to the cloud and collated with the drones’ observations and finally stored.
Overall, the decision-supporting products can be of great importance for many farmers in the future, as they can adapt the allocation of water, nutrients, pesticides and the like at specific sites of the field for the benefit of the environment, crop growth and production economies.
Financing
SqM-Farm starts January 1, 2018 and ends December 31, 2022. GUDP under the Ministry of Environment and Food of Denmark has allocated 14,796,460 kr. for the project.
Partners
Agro Intelligence, Aarhus University, Gyldensteen Gods, University of Southern Denmark, Ceptu, IBM and Conpleks Innovation.
Indoor-outdoor-indoor 2019
Sensor and controlling technology for autonomous robots running between indoor and outdoor areas
The trend in robot development today is to make a clear distinction between robots for indoor and outdoor use. This is for instance because, each robot type requires different mechanical constructions, physical characteristic and technological solutions. Unlike indoor robots, outdoor robots must be able to resist wind and weather, be robust and be able to drive in hilly and steep terrain.
Outdoor obstacle detection and categorization using AI
Background
During the last few years, the number of indoor, mobile logistic robots in both service and healthcare sectors as well as in the industry has increased significantly. As more and more robots are installed in companies and hospitals all around, the user awareness and the awareness amongst people, who encounter the robots, increases. This includes, how the robots can be used, as well as desires and requirements for new functions.
The project aims to address the issue with an increasing need for robots that can navigate both indoor and outdoor, while amending the development of the necessary sensor and controlling technology that allows indoor-outdoor-indoor driving.
Sensor technology must connect indoor with outdoor and indoor
In connection with the technological solutions for location and navigation, indoor and outdoor mobile robots traditionally use different methods and technologies. According to this, it is rare that already existing robots can move around both indoor and outdoor, such as crossing an outdoor area to get from one building to another. One way to realize indoor-outdoor-indoor driving is to use the already known methods that work within the two areas. Since a combination of the different types of sensors will be able to compensate for the limitations of the individual sensors.
The interaction between different sensors in the transition between indoor and outdoor areas is one of the project’s focal points. Including, how the robot can detect, when it crosses the boundary between the areas. Due to this, a solid detection of, when the robot travels from one area to another, and an evaluation of the data quality from the robot’s sensors, including GPS, LIDAR and camera, have been made for each area. The latter is especially important, as big differences in how a camera reacts in indoor lighting and outside in direct sunlight may occur.
The project
The development project is supported by the Danish Ministry of Higher Education and Science under the Ministry of Education and Research.
Partners
Danish Technological Institute, SDU – Mærsk McKinney Møller Institute, Capra Robotics ApS, CesTek Automation, Maskinsikkerhed ApS, Robotize ApS, Center for Real-estate The Capital Region of Denmark and Conpleks Robotech.
FODS project for TAPAS network testing 2018
New test platform in Aarhus for precise positioning
The new test platform, TAPAS, opens up some unique opportunities for the work with precise positioning and can thus contribute to Denmark being at the forefront of technological development within drones, autonomous cars and robots. It is the Agency for Data Supply and Efficiency (SDFE) that is behind the TAPAS network, which combines satellite data from different satellite systems. TAPAS is accessible to as well companies as public institutions for testing very precise positioning.

Photo: SDFE
Background
The TAPAS network consists of eleven reference stations located with a maximum of seven kilometers between stations. The stations emit signals the autonomous vehicles can navigate by. Additionally, a number of researchers will use the eleven reference stations to develop a very high data quality of signals from navigation satellites including GPS, Glonass and Galileo. Such a high quality that it can take urban spaces as well as disturbances in the atmosphere, the troposphere and the ionosphere into account; even rain, which can affect the accuracy of the signals by several centimeters.
To test the TAPAS network, SDFE has set up a project, FODS, and joint forces with Conpleks, which participates in the project with a semi-autonomous lawnmower robot.
Conpleks delivers centimeter precise test results
Conpleks has connected the first robot, a semi-autonomous lawnmower robot, to the TAPAS network, which will perform a series of tests with which SDFE and the other project partners can clarify the purposes set by the FODS project. By using the network, Conpleks can position the robot very precise, as different tests have shown accuracy of 1 cm and below. This is important as precision is one of the most important parameters for solving tasks with outdoor, mobile robots.
The main purpose of the tests is to investigate the extent to which the real-time positioning in the cloud of a semi-autonomous, GNSS-based vehicle is actually usable in relation to the level of precision a municipality needs when increasing the automation of operation and maintenance of urban areas. In continuation of this, the technical possibilities for integrating positioning data from Conpleks Clara Cloud into a municipality’s operating software must be uncovered, together with an assessment of the extent to which the solutions can help pave the way for similar initiatives at other municipalities and authorities.
In other words, the project must ensure the municipality’s employees a more efficient and faster access to real-time data for autonomous vehicles in connection with the execution and planning of maintenance tasks. At the same time, the project must provide increased insight into possible technical barriers to establishing a common municipal data infrastructure for use of positioning and navigation data for maintenance of public urban areas. Last but not least, the project must prepare a cost-benefit analysis based on the costs of the project compared with the observed savings.
The project
The Agency for Data Supply and Efficiency is the initiator of the FODS project, which begins in August 2018 and runs until the end of December 2018.
Partners
The Agency for Data Supply and Efficiency, Aarhus Municipality, Sweco, DTU Space and Conpleks Innovation.
GrassBot2 2018-2020
Autonomous lightweight field robot with innovative security system for harvesting lowland areas
GrassBot2 builds on the previous GrassBot project that developed a lightweight field robot, which was able to harvest biomass on lowland areas. Therefore, the next step for GrassBot2 is to make the field robot able to gather the harvested biomass as well. Over time the gathered biomass will be used for green protein production for feeding pigs and chickens, while the remaining product will be used for biogas.

Background
The purpose of the GrassBot2 project is to design and develop an autonomous lightweight field robot solution constructed for harvesting and transportation of grass on lowland areas. Furthermore, the solution must be integrated with a security system, which can handle the general steering and control of the field robot and can detect and avoid obstacles in the field such as animals, hydrants and other machines.
Conpleks contributes with the above-mentioned innovative security system including an application controller handling the obstacle avoidance behavior, and a safety controller handling personal safety. The two controllers will respectively be coupled with sensors as well as cameras and software algorithms in collaboration with the other partners. In addition to developing the controllers, Conpleks develops a cloud solution that gathers the project data.
Optimum utilization of biomass on lowland areas
Traditional harvesting machines, which are heavy and thereby able to damage the carrying capacity of the turf, can only be used on lowland areas within a short period of time. Using the GrassBot2 project’s lightweight solution, lowland areas can be harvested over a longer period of time and thus several times during a season, increasing the yield and quality of the biomass.
Furthermore, the GrassBot2 project will work on optimizing the production, harvesting and transportation of green biomass, including maximizing yield and quality of green protein derived from moisture tolerant grass varieties grown on lowland areas. This includes scientific experiments, where the grass varieties are grown at different fertilizer levels and harvest times, after which the protein content and extractability are analyzed.
Financing
GrassBot2 starts May 1, 2018 and ends July 31, 2020. EU’s European Regional Development Fund and ERST/Region Midtjylland has allocated 1.999.982 kr. for the project.
Partners
Agro Business Park, AgroIntelli, Lykketronic, Aarhus University – Agro, Aarhus University – Eng and Conpleks Innovation.


AutoTurf – Energy efficient autonomous robot for grass cutting in golf courses 2016-2019
The purpose of the AutoTurf-project is to develop, test and document a solution for energy efficient and automated grass cutting in golf courses.
Background
Through an extensive innovation effort the project creates a foundation for a finished concept for a fully functioning autonomous robot for grass care, which is based on an innovative prototype of an autonomous robot. The robot can be equipped with various tools for grass care such as cutting, mowing, and vertical cutting. Thereby, it is possible to market a new product for automated and multifunctional grass care on larger, cohesive areas. At the moment, there are no such approved autonomous robots, which cover the demands for professional high-end machinery.
The project is based on Region Syddanmark’s knowledge and competences within energy efficiency, mechatronic systems and autonomous robot technology.
Automation of routine grass care
The innovative AutoTurf concept with an energy efficient autonomous robot for grass care in larger, cohesive areas is particularly pioneering as it creates the opportunity to have a fully automated solution where you have a task that is characterized by significant routine work. Thereby classic automation advantages are introduced which reduces cost for staff, fuel and machines. At the same time you minimize the use of pesticides and fertilizer due to optimzed grass care. The autonomous robot solution is under the megatrend of development of autonomous vehicles. AutoTurf is expected to see a great demand in the market for professional grass care. The value will be in one of the outer areas of Region Syddanmark.
Financing
Conpleks is partner in the AutoTurf-project and takes care of research and development of the related cloud solutions. The project is supported by EU and Region Syd and goes on until 2019.
Partners
Sidis Engineering ApS, Syddansk University, CLEAN, Banke ApS and Conpleks Innovation.
SAFE – Safer Autonomous Farming Equipment 2014-2017
Development of safer autonomous farming equipment
The automation of the farming sector is seriously on the agenda, both in the EU frame program, Horizon2020, and through the global need for an optimization of our food resources. Here robot technology has proven efficient in several ways, including the increased demands to safety in an agricultural sector that is being increasingly automated. Hence, the SAFE-project is focusing on safety issues.
Background
The purpose of the SAFE-project is to develop autonomous, agricultural devices that can mow, harvest and clean without any risk to animals and human beings. Today autonomous agricultural devices are already in the fields, but the disadvantage is that they have to be monitored constantly to protect humans and animals.
In SAFE we gather large machinery manufacturers for the agricultural sector and the universities to develop sensors and more sophisticated analyses of data that can refine the autonomous machines to better register, when people and animals are in the vicinity of the machines. This can prevent accidents and will to a much higher degree than today protect animals (deer, birds etc.) hiding in the fields
The combination of the expertise of these companies and the competences of the researchers in sensor technology should ensure the optimum combination of sensors for each individual agricultural machine. The sensors are the eyes and ears of the machines, and the placement of them has to be optimized for each individual machine. A harvester has to look out for other things than a tiller hoe.
Big potential for commercialization
Increased automation and safety is necessary to support the farmer of the future, especially where land preservation for crop growing and efficient farming are essential and the cooperation in this project will have a significant impact of the development of this area.
The biggest showstopper for releasing the robots in the field has been safety and it is the project members hope that their knowledge and research competences will result in commercial products that can create the foundation for letting robots take over jobs at the farm or at least add to the safety, when the farmer is moving around in the field with high and wide machinery.
Financing
The project starts on March 1, 2014 and ends August 31, 2017. The Innovation foundation has granted 15 million DKK, and the project budget is 29 million DKK.
Partners
AgroIntelli, Aarhus Universitet, KeyResearch, CLAAS Agrosystems, Syddansk Universitet, Innovationsnetværket RoboCluster and Conpleks Robotech.
GrassBots research project 2012-2014
Small robots can become an important tool in increasing productivity and sustainability in farming
Technology is everywhere in farming and it is becoming more and more intelligent. Intelligent scarecrows and drones that can see birds, deer and weed in the fields are getting into farming everywhere and one of the more recent is use of small robots in the fields.

Improve nature and environment and contribute with raw material for biobased production
The business development project GrassBots 2012-2014, which among other things involved researchers from Aarhus University and University of Southern Denmark and a number of commercial partners, developed a platform, which via a small light-weight farming machine was able to harvest at low grounds e.g. river valleys where traditional farming machines cannot be used.
The biomass from this can have a significant impact on the future biobased community. In valleys or other grounds hard to access, harvesting crops can improve nature and environment and at the same time provide raw materials for biobased production.
Several machines, one operator
Apart from low weight, the advanced navigation software, route planning and positioning systems enables the machine to run autonomously. This means the farmer can go from being operator to being observer for a handful of machines with different functions. This will increase productivity of various tasks and reduce compaction and fuel consumption.
The GrassBot prototype consists of known tools, e.g. a Lynex tool carrier, a Kongskilde grass cutter and a new Conpleks Robotech Controller.
Partners
The GrassBot-project involves Aarhus University, Kongskilde Industries, Lynex, Conpleks Innovation, Syddansk University, Bertelsen Design and Agro Business Park as partners, and universities in Finland and England through the financing from EU/ICT-Agri. Besides this also the Danish Region Midtjylland supports the project via the business development program; Biomass for energy.
CLARA SmartAgriFoodII Project 2014-2015
Conpleks was given a grant for the development of the so-called Clare App software platform from the EU SmartAgriFoodII program. The Clara-project was running in 2014-2015 with the purpose to develop a software platform for smart Apps controlling agricultural robots among other things.

In this connection, Conpleks developed the App itself, the underlying software architecture and the software for integration with the robots and sophisticated farming equipment, which are to be controlled by the App. To do this, Conpleks used completely new software tools as part of the FIWARE development program.
The SmartAgriFood Accelerator program supports the SMVs that develop smart services and Apps for use in the farming and food sectors. After an application process that had more than 150 applicants, the SmartAgriFood Accelerator program selected 50 of the most promising companies and projects to support; among these Conpleks with the Clara App.